FIU-ARC Lateral Gamma Scanner featured at WRP FY2022 Accomplishments
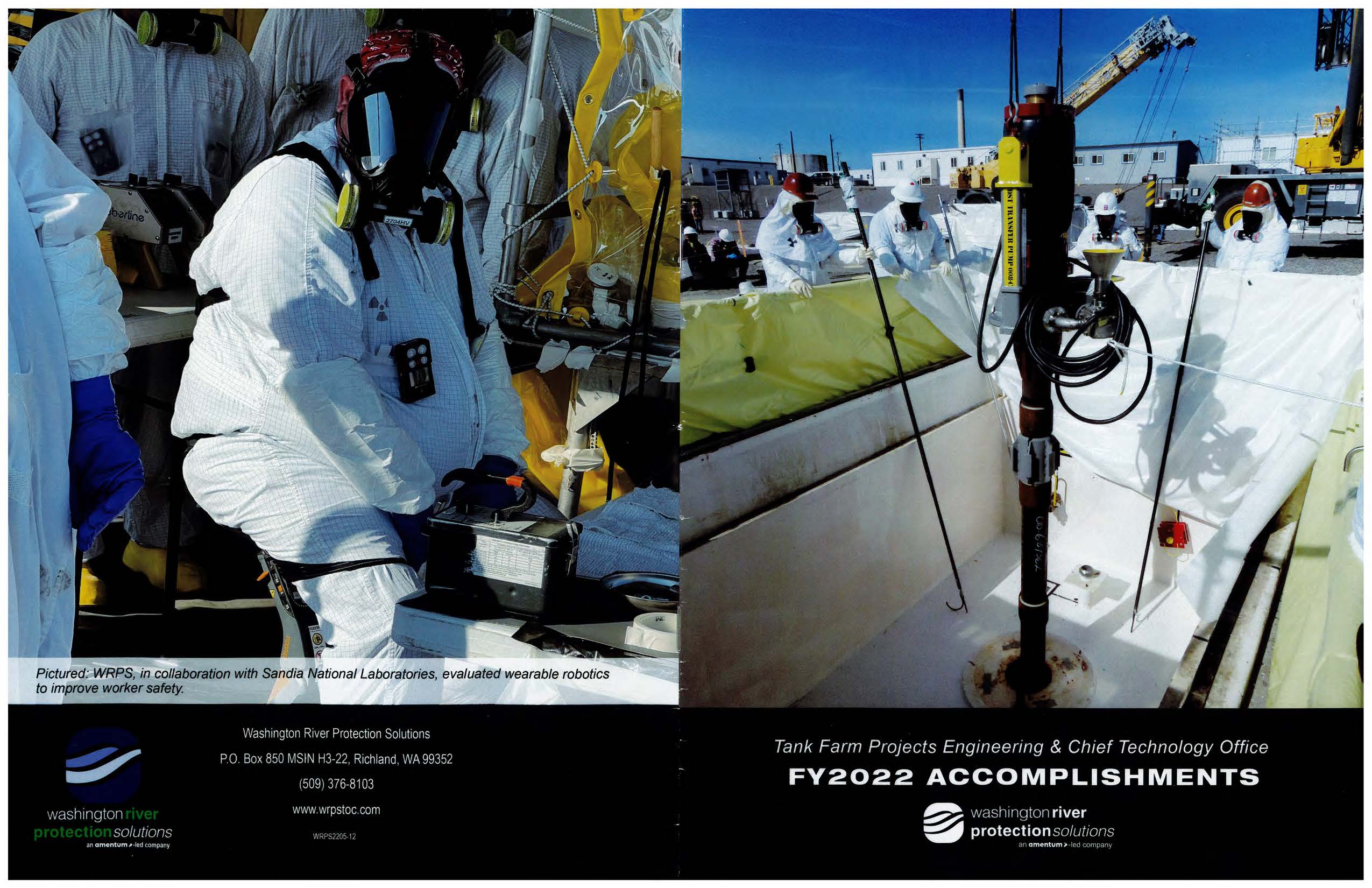
The FIU-ARC robotics team is proud to share the news its Lateral Gamma Scanner deployment was featured in the Washington River Protection Solutions (WRPS) FY2022 Accomplishments. Thanks to all involved in the DOE Fellow Josue Estrada‘s deployment at Hanford. Special thanks to the relentless contribution of Mackenson Telusma, Sebastian Story, and Jeff Natividad. Also, thanks to Gabriel, Abdiel, Shawn, and the newly hired Theo and David. We also thank Claudia and…